13. Model Reference¶
13.1. Pose¶
Model pose can be exported to .c3d and .fbx files.
The .c3d files contain the 4x4 pose matrices for each model segment and the local coordinates of the anatomical landmarks of the distal segments of the model (feet, hands, head). These files can be processed using Visual3D.
The .fbx files contain the hierachical skeleton, pose, and bone meshes of the animation model. The first frame of the file contains the model in a “T-Pose”.
13.2. Model Description¶
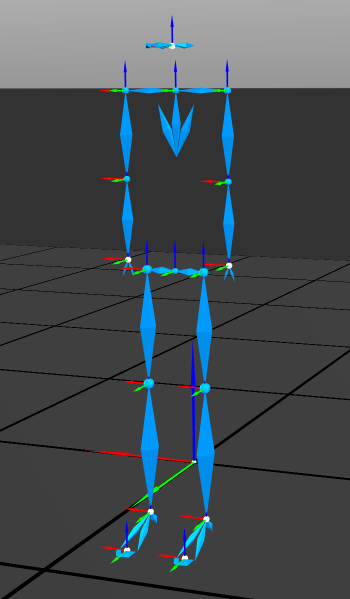
The Standard Theia3D kinematic model.
The standard kinematic model consists of two kinematic chains - one for the upper body and one for the lower body - and a six degree of freedom head. The kinematic chains are hierarchical collections of segments connected by joints as described below. There are options to use free (6dof) joints for the shoulder and ankles. There is also an animation specific model that has a single kinematic chain comprising the lower body, upper body, and head, with the pelvis as the root segment.
Head
- Parent: Lab
Origin: Midpoint of ears
Joint: Free joint (6 DOF)
Upper Body
- Torso
Parent: Lab
Origin: Base of neck
Joint: Free joint (6 DOF)
- Right Clavicle
Note: for Animation Model, i.e. only included in FBX file outputs
Parent: Torso
Origin: Base of neck
Joint: Two rotational degrees of freedom (about anterior-posterior and superior-inferior axes)
Proximal: Base of neck
Distal: Right shoulder
- Right Upper Arm
Parent: Torso
Origin: Right shoulder
Joint: Three rotational degrees of freedom or a free joint (6 DOF)
Proximal: Right shoulder
Distal: Right elbow
- Right Lower Arm
Parent: Right Upper Arm
Origin: Right elbow
Joint: Two rotational degrees of freedom (flexion/extension, pronation/supination)
Proximal: Right elbow
Distal: Right wrist
- Right Hand
Parent: Right Lower Arm
Origin: Right wrist
Joint: Two rotational degrees of freedom (flexion/extension, ad/abduction)
Proximal: Right wrist
Distal: Right mid hand
- Left Clavicle
Note: for Animation Model, i.e. only included in FBX file outputs
Parent: Torso
Origin: Base of neck
Joint: Two rotational degrees of freedom (about anterior-posterior and superior-inferior axes)
Proximal: Base of neck
Distal: Left shoulder
- Left Upper Arm
Parent: Torso
Origin: Left shoulder
Joint: Three rotational degrees of freedom or a free joint (6 DOF)
Proximal: Left shoulder
Distal: Left elbow
- Left Lower Arm
Parent: Left Upper Arm
Origin: Left elbow
Joint: Two rotational degrees of freedom (flexion/extension, pronation/supination)
Proximal: Left elbow
Distal: Left wrist
- Left Hand
Parent: Left Lower Arm
Origin: Left wrist
Joint: Two rotational degrees of freedom (flexion/extension, ad/abduction)
Proximal: Left wrist
Distal: Left mid hand
Lower Body
- Pelvis
Parent: Lab
Origin: Midpoint of hips
Joint: Free joint (6 dof)
- Right Thigh
Parent: Pelvis
Origin: Right hip
Joint: Three rotational degrees of freedom
Proximal: Right hip
Distal: Right knee
- Right Shank
Parent: Right thigh
Origin: Right knee
Joint:Two rotational degrees of freedom (flexion/extension, ad/abduction) or three rotational degrees of freedom (flexion/extension, ad/abduction, internal/external rotation)
Proximal: Right knee
Distal: Right ankle
- Right Foot
Parent: Right Shank
Origin: Right ankle
Joint: Three rotational degrees of freedom or a free joint (6 DOF)
Proximal: Right ankle
Distal: Right mid foot
- Right Toes
Parent: Right Foot
Origin: Right mid foot
Joint: One rotational degree of freedom (flexion/extension)
Proximal: Right mid foot
Distal: Right big toe
- Left Thigh
Parent: Left
Origin: Left hip
Joint: Three rotational degrees of freedom
Proximal: Left hip
Distal: Left knee
- Left Shank
Parent: Left thigh
Origin: Left knee
Joint: Two rotational degrees of freedom (flexion/extension, ad/abduction) or three rotational degrees of freedom (flexion/extension, ad/abduction, internal/external rotation)
Proximal: Left knee
Distal: Left ankle
- Left Foot
Parent: Left Shank
Origin: Left ankle
Joint: Three rotational degrees of freedom or a free joint (6 DOF)
Proximal: Left ankle
Distal: Left mid foot
- Left Toes
Parent: Left Foot
Origin: Left mid foot
Joint: One rotational degree of freedom (flexion/extension)
Proximal: Left mid foot
Distal: Left big toe